北航数字导航中心从“十一五”开始开展中小型飞行器自主导航技术研究,以体积小、成本低的微机电器件为核心,研发了集三个陀螺仪、三个加速度计、三轴磁传感器、气压高度计和卫星导航接收机于一体的中小型飞行器自主导航系统,并重点研究了自主导航系统的初始姿态解算算法、惯性导航参数解算算法以及惯导/卫星组合导航解算、姿态实时更新算法、自主导航控制算法以及地面控制站软件开发。在此基础上开展了将微惯性导航系统、卫星导航系统和地形辅助导航系统进行组合实现中小型飞行器自主导航以及目标自动跟踪与定位的可行性分析与论证,自主研发了相应的机载处理器并对中小型飞行器自主导航与定位技术进行实验验证研究。
利用小型无人机对自主研发的自主导航系统进行试飞实验,并已在灾情侦查、缉毒以及巡线等领域进行了实验性应用。
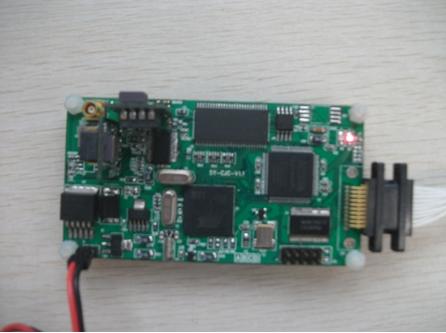
自动驾驶仪
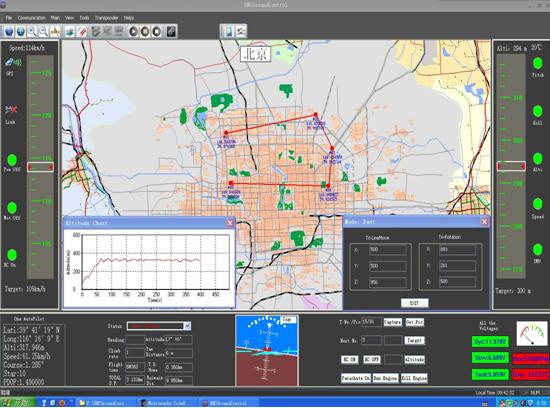
地面站软件

地面站系统


